
-
第二章作业第二题作业代码框架疑问
——来自《激光SLAM理论与实践- 第四期》·17浏览
里程计位姿的积分
-
请问第14页中的S是什么
——来自《激光SLAM理论与实践- 第四期》·15浏览
是的,x取任意值时的Ax组成的集合
-
提问
——来自《激光SLAM理论与实践- 第四期》·26浏览
细节方面还是有一些差异的,比如视觉可以用一个大BA进行后端优化,激光比较喜欢用位姿图优化,但大部分的数学基础是相通的,建议做激光slam也学学十四讲
-
可以理解成在上一时刻的车体坐标系下那个位置,看下一时刻车的位置,为(dx,dy,dth)。之后这个增量左乘costh, -sinth; sinth, costh;矩阵,相当于是把增量从车体坐标系转到了世界坐标系,这样一步步推算车在世界坐标系下的位姿
-
orb主函数中会建一个System,通过System读入单目,双目,或者rgbd数据,例如GrabImageMonocular,之后在这个函数中调用Track(),进行主要的跟踪处理
-
接受和发射之间有夹角怎么排除
——来自《激光SLAM理论与实践- 第三期》·13浏览
你是指激光雷达么?这个做相关设备的公司会解决的。我们自己用的时候基本可以忽略这些误差,或者把这些误差和其它等误差归结为系统误差,通过其它补偿方式消除
-
关于代码
——来自《激光SLAM理论与实践- 第三期》·43浏览
从语法的角度讲,origin_x是map这个对象的public成员变量,它可以被赋值。这行代码的意思是将机器人的位姿作为这个地图的原点,这样以防有信息超过地图的边界。
-
第五次作业
——来自《激光SLAM理论与实践- 第三期》·50浏览
-
第五次作业
——来自《激光SLAM理论与实践- 第三期》·50浏览
这里我直接拿助教在群里的解释了。其实意思刚好和你说的是反过来的,先是通过R_odom.transpose() * deltaPose将运动增量从odom坐标系转到机器人(激光雷达)本体坐标系,之后再转到LaserPose所在的世界坐标系。
-
获取激光雷达t时刻在里程计中的位姿?
——来自《激光SLAM理论与实践- 第三期》·37浏览
也可以这样子做。但如果每个点都通过tf插值来得到一个位姿,整体的效率就会低很多。一般认为当每个要线性插值的时间段足够短了,这段时间内通过统一的线性插值也能足够接近于原轨迹。
-
不走回头路
——来自《激光SLAM理论与实践- 第三期》·45浏览
可以作为激光里程计使用
-
关于旋转矩阵的求导问题
——来自《视觉SLAM进阶:从零开始手写VIO- 第三期》·42浏览
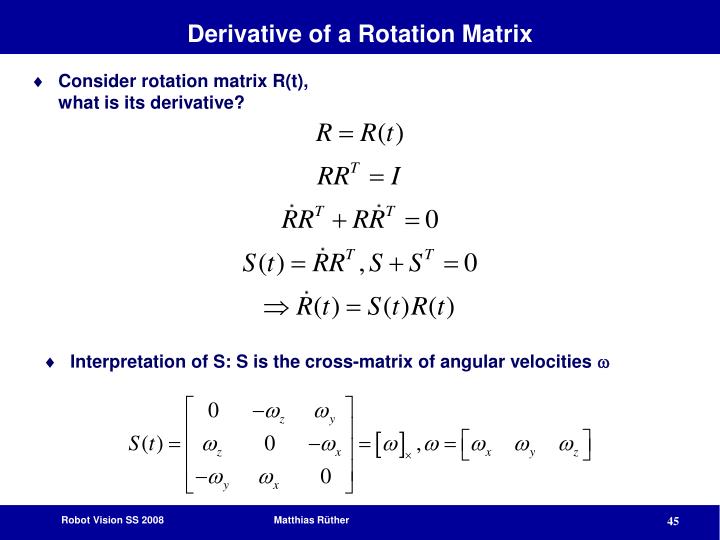
https://robotacademy.net.au/lesson/derivative-of-a-rotation-matrix/
-
三次绕固定轴旋转的最终姿态和以相反顺序三次绕运动坐标轴旋转的最终姿态公式结果相同
https://zhuanlan.zhihu.com/p/85108850
https://blog.csdn.net/yukinoai/article/details/90573008
-
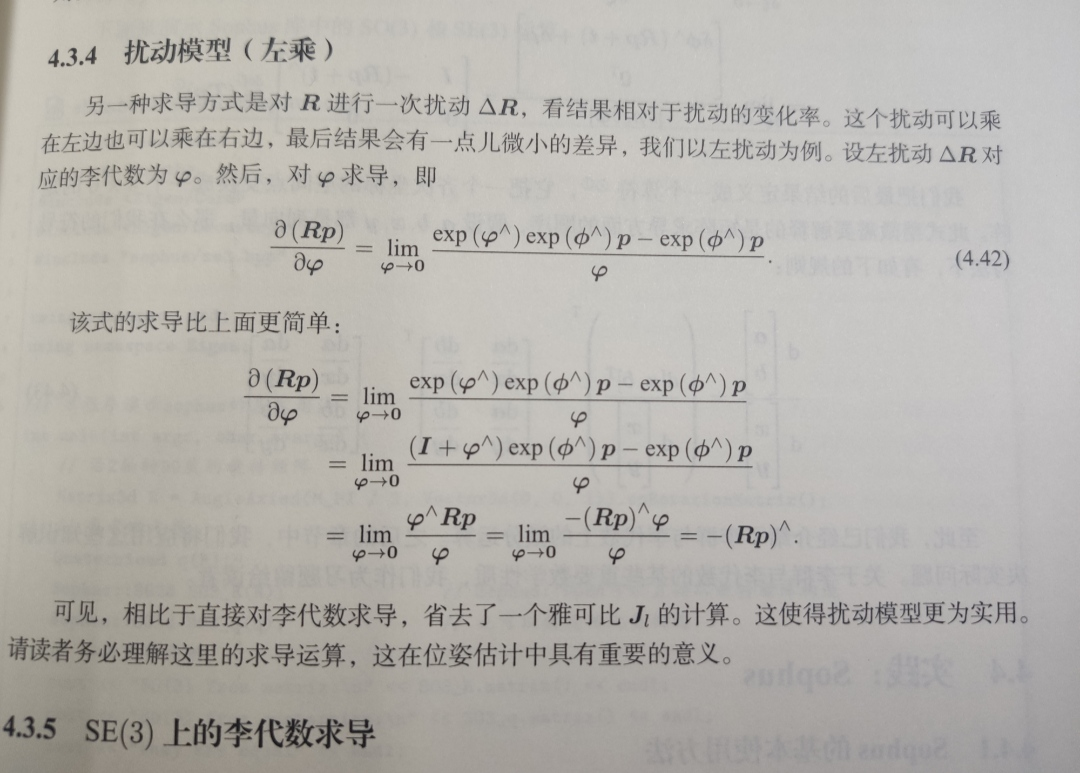
不成立,vee运算符是对反对称矩阵进行操作的
-
我的理解这是两种不同的求导方式,一个是对李代数进行扰动求导,一个是对李群进行扰动求导。
-
十四讲上对这两种求导方式也分别进行了介绍,详见你截图那部分后面一节的内容,我这图片不知道为啥传不上去
-
-
我的感觉跟楼主一样,我也觉得I和W的位置好像是反了。。。
-
对于李群李代数运算的理解
——来自《视觉SLAM进阶:从零开始手写VIO- 第三期》·145浏览
https://www.cnblogs.com/gaoxiang12/p/5137454.html
李群李代数的exp映射和ln映射可以看以上这篇高翔博士的博客,也可以参阅《视觉SLAM十四讲》















