-

学习时长
10周/建议每周至少6小时
-

答疑服务
专属微信答疑群/讲师助教均参与
-

作业批改
每章节设计作业/助教及时批改评优
-

课程有效期
一年/告别拖延,温故知新


- 第1章: 课程介绍
- 第1节: 泊车任务介绍(APA/AVP/记忆泊车)
- 第2节: 课程大纲与课程实践
- 第3节: 编程基础&环境准备
- 第2章: 运动估计
- 第1节: 车辆运动学模型
- 第2节: IMU状态估计
- 第3节: 扩展卡尔曼滤波(EKF)
- 第4节: 轮速IMU融合定位
- 第3章: 相机模型
- 第1节: 针孔相机模型
- 第2节: 鱼眼畸变矫正
- 第3节: IPM图像拼接
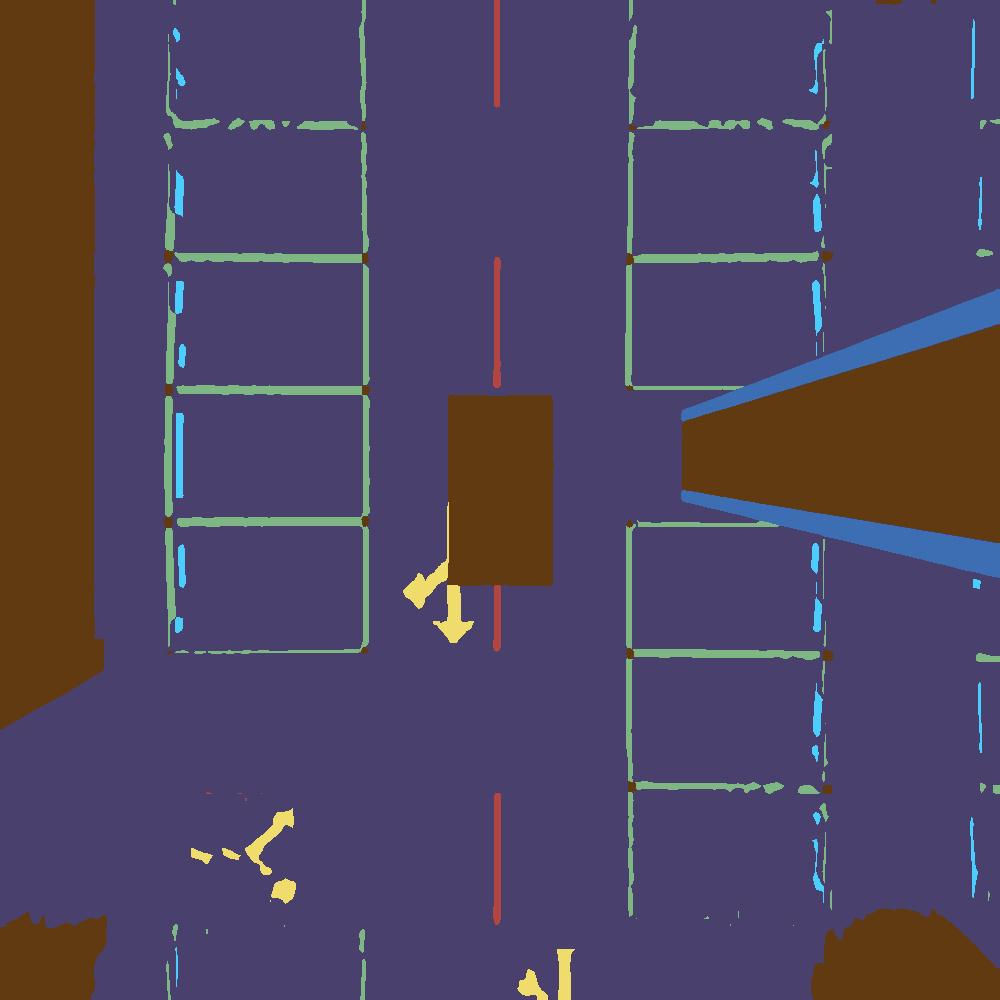
- 第4章: 泊车感知语义分割
- 第1节: 语义分割任务介绍
- 第2节: 模型网络结构
- 第3节: 网络模型训练
- 第5章: 泊车地图构建
- 第1节: 坐标系变换
- 第2节: 语义地图构建
- 第3节: 停车位检测
- 第6章: 泊车语义定位
- 第1节: 语义点云配准
- 第2节: KD树构建
- 第3节: 视觉IMU轮速融合定位
- 第7章: 轨迹规划
- 第1节: 轨迹搜索
- 第2节: 轨迹平滑
- 第3节: hybrid A*轨迹规划
- 第8章: 车辆控制
- 第1节: 车辆运动学模型
- 第2节: PID/LQR控制
- 第3节: 模型预测控制
- 第9章: 大作业实践
- 第1节: 泊车仿真器介绍
- 第2节: 环境仿真搭建
- 第3节: AVP仿真整体流程
- 第10章: 自主泊车前沿分享
- 第1节: 基于模仿学习的端到端自动驾驶
- 第2节: 基于强化学习的混合策略泊车
- 第3节: 基于视觉语言模型的智能AVP

课程的每一章节将会配备相应的实践项目,包括泊车所需软件环境安装、泊车定位、泊车感知、泊车建图、规划与控制,最后由同学们将每一章节的实践内容串在一起,在仿真环境中,实现一个完整的自主代客泊车系统。
泊车感知
泊车建图与定位
泊车规划与控制