分享至
主讲人:刘思康 | 大疆车载规控组负责人
2022.10.20 20:00
85分钟
24211人次学习
立即学习
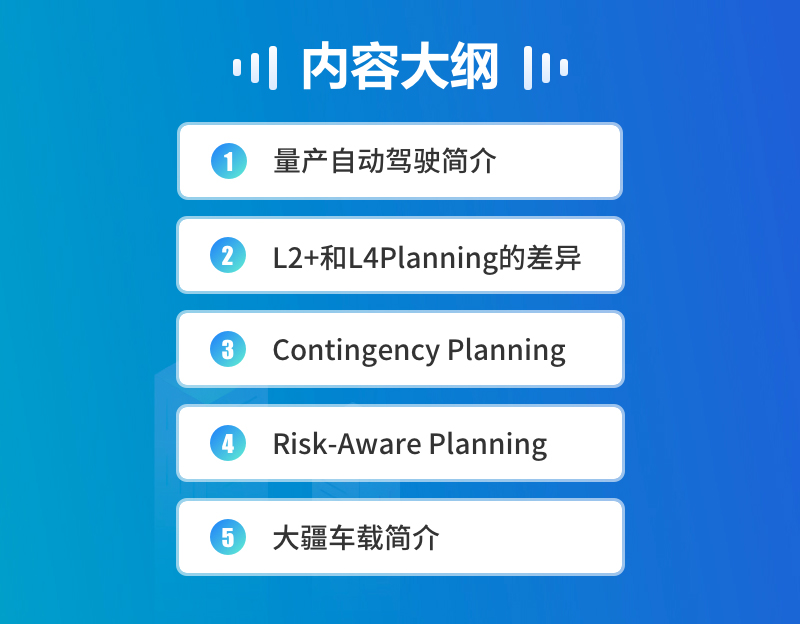
本场分享首先简述量产自动驾驶中两条主流路线,然后分析L2+与L4不同自动驾驶层级中规划问题的差异,包括是否依赖高精度地图、感知不确定性带来的影响,最后重点介绍防御性规划(Contingency Planning)以及预期风险规划(Risk-Aware Planning)的概念以及在自动驾驶中的应用。
报名成功
扫码备注【决策规划】领取PPT
点此立即学习
添加微信领取课件
一定记得备注【决策规划】



















 报名成功
报名成功