课程价格 :
¥699.00
剩余名额
0
-

学习时长
6周/建议每周至少6小时
-

答疑服务
专属微信答疑群/讲师助教均参与
-

作业批改
每章节设计作业/助教及时批改评优
-

课程有效期
一年/告别拖延,温故知新
课程价格:
¥699.00
预约下一期 *课程已报满,可预约下一期
 支持花呗分期
支持花呗分期
*课程已报满,可预约下一期



- 1-1:【文档】开课仪式
- 1-2:参考资料
- 1-3:【推荐书籍】Matrix Computations
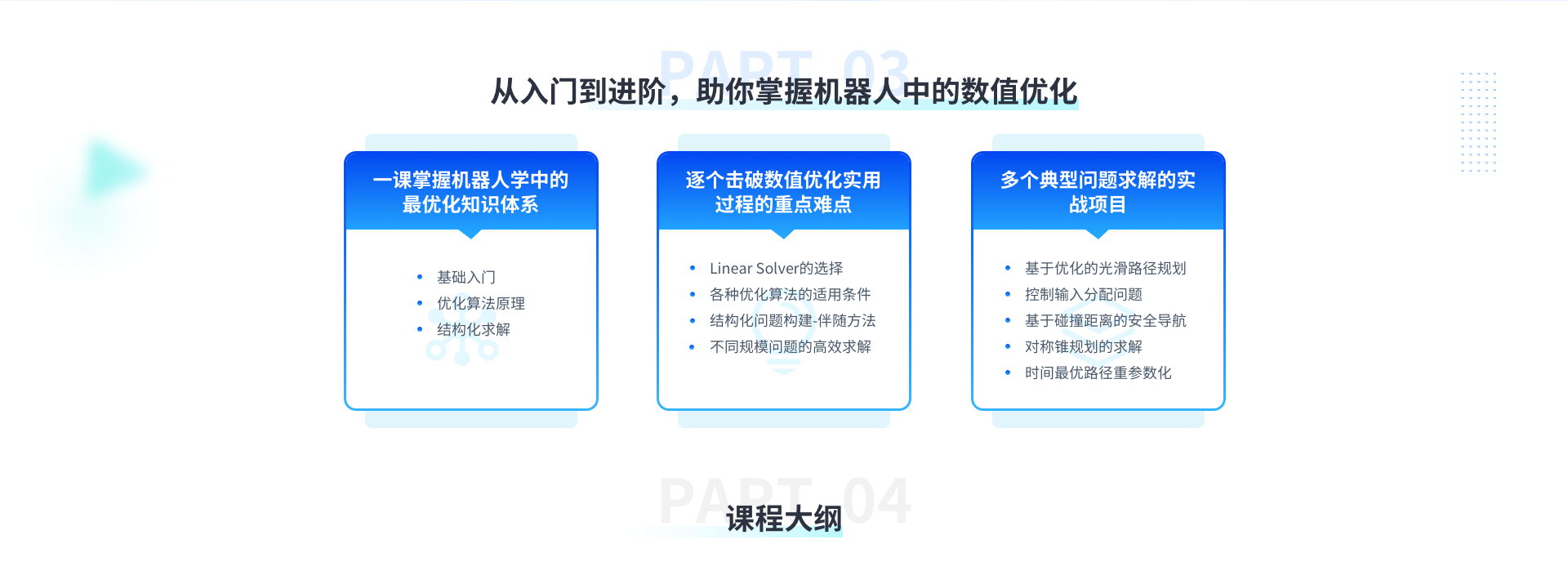
- 第1章: 数值优化基础
- 2:【课件】Numerical Optimization in Robotics
- 第1节: 数学规划与机器人学
- 3:【视频】Introduction
- 第2节: 凸集合与凸函数
- 4-1:【视频】Convex Sets
- 4-2:【视频】High-Order Info of Functions
- 第3节: 凸函数的性质
- 5:【视频】Convex Function Property
- 第4节: 无约束优化:线搜索最速下降法
- 6:【视频】无约束优化
- 第5节: 无约束优化:修正阻尼牛顿法
- 7:【视频】Modified Damped
- 第6节: 作业
- 8-1:【作业】Project1
- 8-2:【文档】第一章作业思路提示
- 第2章: 无约束优化
- 9:【课件】Numerical Optimization in Robotics
- 第1节: 本章内容介绍
- 10:【视频】本章内容介绍
- 第2节: 拟牛顿法
- 11-1:【视频】为什么要引入拟牛顿法
- 11-2:【视频】凸且光滑的函数的BFGS优化算法
- 11-3:【视频】非凸但平滑的函数BFGS优化算法
- 11-4:【视频】L-BFGS优化算法
- 11-5:【视频】非凸非平滑函数的BFGS优化方法
- 第3节: 共轭梯度(CG)方法
- 12-1:【视频】线性共轭梯度法
- 12-2:【视频】牛顿共轭梯度法
- 第4节: 无约束优化应用:平滑导航路径生成
- 13-1:【视频】应用:平滑导航路径生成
- 13-2:【作业说明】L2-Instruction
- 第5节: 作业
- 14-1:【资料】示例代码参考
- 14-2:【作业】Project2
- 14-3:【文档】第二章作业思路提示
- 第3章: 约束优化
- 15:【课件】Numerical Optimization in Robotics
- 第1节: 章节引入
- 16:【视频】带约束优化问题的定义
- 第2节: 约束优化的形式分类及其复杂度
- 17:【视频】带约束优化问题的分类及复杂度
- 第3节: 低维线性时间线性规划算法:Seidel算法
- 18:【视频】低维线性时间线性规划算法:Seidel算法
- 第4节: 低维线性时间严格凸二次规划算法
- 19:【视频】低维线性时间严格凸二次规划算法
- 第5节: 约束优化的3种序列无约束化方法
- 20:【视频】约束优化的3种序列无约束化方法
- 第6节: KKT条件与PHR增广拉格朗日乘子法
- 21-1:【视频】KKT条件与PHR增广拉格朗日乘子法
- 21-2:【视频】PHR增广拉格朗日乘子法
- 第7节: 约束优化应用1:控制分配问题
- 22:【视频】约束优化应用1:控制分配问题
- 第8节: 约束优化应用2:碰撞距离计算
- 23:【视频】约束优化应用2:碰撞距离计算
- 第9节: 约束优化应用3:非线性模型预测控制
- 24:【视频】约束优化应用3:非线性模型预测控制
- 第10节: 作业
- 25-1:【作业资料】HW3
- 25-2:【作业】Project3
- 25-3:【文档】第三章作业思路提示
- 第4章: 对称锥规划
- 26:【课件】Numerical Optimization in Robotics
- 第1节: 锥和对称锥
- 27:【视频】锥与对称锥
- 第2节: 对称锥的增广拉格朗日乘子法
- 28:【视频】锥增广的拉格朗日
- 第3节: 对称锥规划应用:时间最优路径重参数化
- 29:【视频】应用:时间最优的路径参数化
- 第4节: 作业实践
- 30-1:【作业】第四章
- 30-2:【文档】第四章作业思路提示
- 第5章: 优化问题的构建和求解技巧
- 31:【课件】Numerical Optimization in Robotics
- 第1节: 函数的光滑化技巧
- 32:【视频】Smoothing Techniques
- 第2节: 伴随灵敏度分析
- 33:【视频】Adjoint Sensitivity Analysis
- 第3节: 线性方程组求解器的分类和特点
- 34:【视频】About Linear Solvers
- 第4节: 优化软件
- 35:【视频】Resources for Optimization Softwares
- 第5节: 实战项目(选修):复杂障碍物环境中的安全导航
- 36-1:【视频】作业说明
- 36-2:【作业】Project5
- 36-3:【文档】第五章作业思路提示
- 第6章: 机器人学中的凸松弛
- 37:【课件】Convex Relaxation in Robotics
- 第1节: 章节介绍
- 38:【视频】章节内容介绍
- 第2节: QCQP问题的凸松弛
- 39-1:【视频】一般QCQP问题的凸松弛分析
- 39-2:【视频】什么条件下紧松弛是稳定的
- 第3节: 黎曼阶梯法
- 40:【视频】黎曼阶梯法
- 第4节: 分布式凸松弛
- 41:【视频】分布式凸松弛
- 第5节: GNC:凸松弛的一般性方法
- 42:【视频】GNC:凸松弛的一般性方法
- 第6节: 参考资料推荐
- 43:【视频】参考资料推荐


复杂障碍物环境中的安全导航

利用本门课程所教授的内容,在提供一定功能模块的前提下,完成二维或三维情况下在复杂多障碍物中的安全导航且满足一定约束的轨迹求解功能。其中每个障碍物均为简单的凸集合,所考虑的全向驱动机器人具有一定的安全半径、速度和加速度的限制。

线性复杂度严格凸二次规划、适用于非光滑函数的有限内存BFGS方法/增广拉格朗日乘子方法、基于伴随方法的问题构建和求解、Eigen、C++和ROS编程能力。